
Logika Fuzzy untuk Sistem Pengatur Kecepatan Mesin

Dalam paper yang berjudul Fuzzy Sets*, pada tahun 1965 Dr. Lotfi Aliasker Zadeh (Ilmuwan Amerika Serikat berkebangsaan Iran dari University of California, Berkeley, California) memperkenalkan teori fuzzy yang mampu memetakan nilai masukan menuju nilai keluaran. Tidak seperti pada logika Boolean yang menyatakan suatu nilai dengan tegas (0 atau 1, hitam atau putih, ya atau tidak, benar atau salah, hidup atau mati), teori fuzzy menggunakan logika yang menyatakan bahwa suatu nilai dapat memiliki range atau derajat level (0 s.d 1, hitam s.d putih). Logika fuzzy dapat diartikan sebagai logika yang samar, kabur, tidak jelas, atau tidak tegas. Logika fuzzy umumnya diterapkan pada masalah-masalah yang mengandung unsur ketidakpastian (uncertainty), ketidaktepatan (imprecise), noisy, dan sebagainya. Logika fuzzy menjembatani bahasa mesin yang presisi dengan bahasa manusia yang menekankan pada makna atau arti (significance). Logika fuzzy dikembangkan berdasarkan bahasa manusia (bahasa alami).
Berikut ini merupakan contoh aplikasi pemrograman logika fuzzy untuk sistem pengatur kecepatan mesin menggunakan sensor suhu dan sensor cahaya sebagai masukan.
Langkah-langkahnya adalah sebagai berikut:
1. Menyusun konsep sistem kontrol dengan logika fuzzy
Misalnya keadaan sensor suhu (input 1) dibagi menjadi lima kategori yaitu:
|
INPUT 1 |
|
|
SUHU |
KETERANGAN |
|
Dingin |
0 0C – 15 0C |
|
Sejuk |
11 0C – 25 0C |
|
Normal |
21 0C – 30 0C |
|
Hangat |
28 0C – 40 0C |
|
Panas |
36 0C – 50 0C |
keadaan sensor cahaya (input 2) dibagi menjadi tiga kategori yaitu:
|
INPUT 2 |
|
|
CAHAYA |
KETERANGAN |
|
Gelap |
0 Cd– 35 Cd |
|
Normal |
31 Cd– 85 Cd |
|
Terang |
81 Cd- 100 Cd |
keadaan kecepatan mesin (output) dibagi menjadi tiga kategori yaitu:
|
OUTPUT |
|
|
KEC. MESIN |
KETERANGAN |
|
Lambat |
0 m/s– 15 m/s |
|
Sedang |
11 m/s – 21 m/s |
|
Cepat |
19 m/s – 45 m/s |
aturan /rules adalah sebagai berikut:
|
No. |
INPUT |
OUTPUT |
|
|
SUHU |
CAHAYA |
KEC. MESIN |
|
|
1 |
Dingin |
Gelap |
Lambat |
|
2 |
Dingin |
Normal |
Lambat |
|
3 |
Dingin |
Terang |
Lambat |
|
4 |
Sejuk |
Gelap |
Lambat |
|
5 |
Sejuk |
Normal |
Lambat |
|
6 |
Sejuk |
Terang |
Sedang |
|
7 |
Normal |
Gelap |
Sedang |
|
8 |
Normal |
Normal |
Sedang |
|
9 |
Normal |
Terang |
Sedang |
|
10 |
Hangat |
Gelap |
Sedang |
|
11 |
Hangat |
Normal |
Cepat |
|
12 |
Hangat |
Terang |
Cepat |
|
13 |
Panas |
Gelap |
Cepat |
|
14 |
Panas |
Normal |
Cepat |
|
15 |
Panas |
Terang |
Cepat |
2. Setelah konsep sistem kontrol dibentuk, maka kita dapat membuat pemrogramannya. Ketiklah “fuzzy” pada command window untuk membuka jendela Fuzzy Inference System (FIS) editor, sehingga muncul tampilan seperti gambar di bawah ini: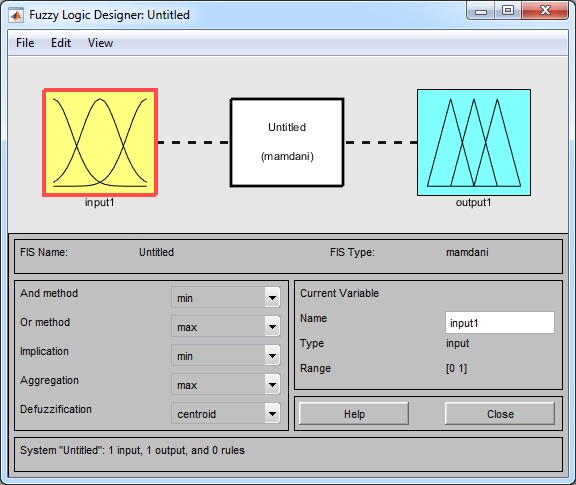
3. Pilih edit >> add variable >> input untuk menambah variable input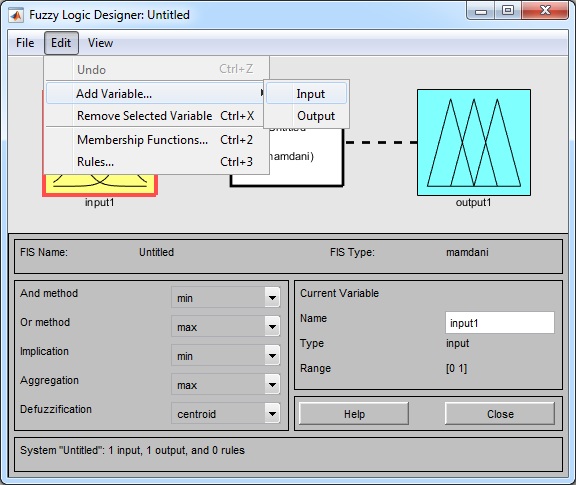
sehingga akan muncul tampilan seperti pada gambar di bawah ini: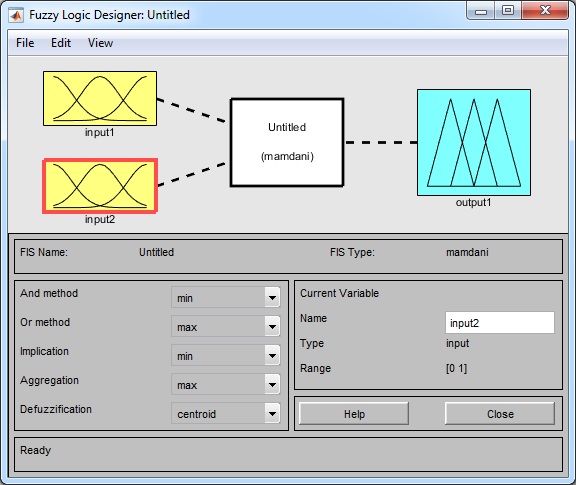
3. Ubahlah nama input1 menjadi suhu, input2 menjadi cahaya dan output1 menjadi kec_mesin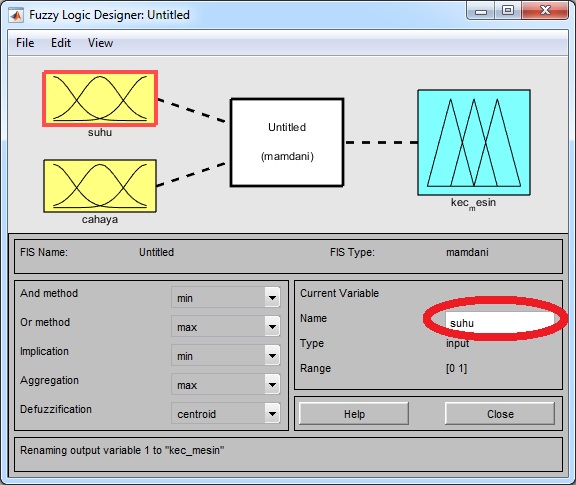
4. Pilih edit >> membership function untuk membuat fungsi keanggotaan setiap variabel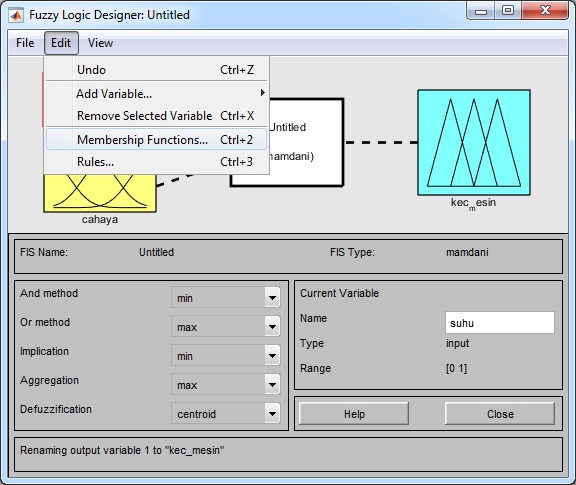
sehingga akan muncul tampilan Membership Function Editor seperti pada gambar di bawah ini: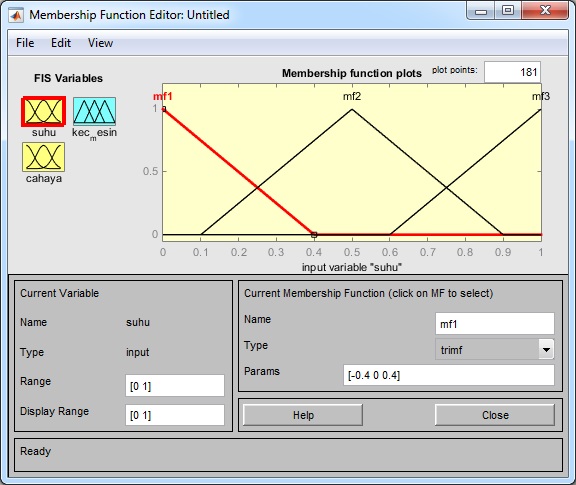
5. Pada variabel suhu, ubahlah
range menjadi [0 50],
nama mf1 menjadi dingin, type trimf, Params [0 0 15]
nama mf2 menjadi sejuk, type trimf, Params [11 18 25]
nama mf3 menjadi normal, type trimf, Params [21 25 30]
pilih edit >> add mfs untuk menambah membership function
nama mf4 menjadi hangat, type trimf, Params [28 34 40]
nama mf5 menjadi panas, type trimf, Params [36 50 50]
sehingga tampilan variabel suhu akan tampak seperti pada gambar di bawah ini:
6. Pada variabel cahaya, ubahlah
range menjadi [0 100],
nama mf1 menjadi gelap, type trimf, Params [0 0 35]
nama mf2 menjadi normal, type trimf, Params [31 50 85]
nama mf3 menjadi terang, type trimf, Params [81 100 100]
sehingga tampilan variabel cahaya akan tampak seperti pada gambar di bawah ini: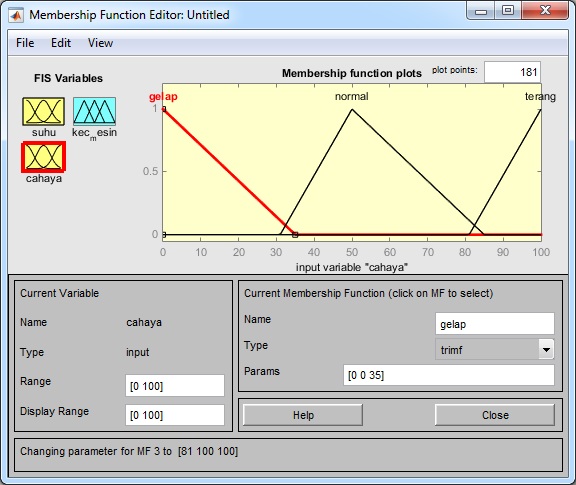
7. Pada variabel kec_mesin, ubahlah
range menjadi [0 50],
nama mf1 menjadi lambat, type trimf, Params [0 0 15]
nama mf2 menjadi sedang, type trimf, Params [11 15 21]
nama mf3 menjadi cepat, type trimf, Params [19 50 50]
sehingga tampilan variabel kec_mesin akan tampak seperti pada gambar di bawah ini:
8. Pilih edit >> rules untuk membuka jendela rule editor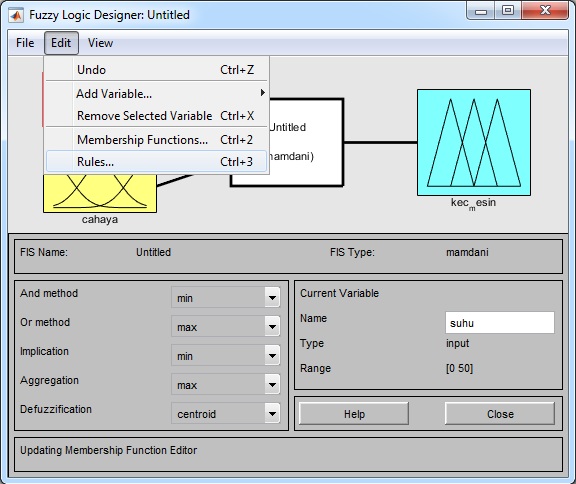
buatlah aturan pada rule editor sesuai dengan konsep sistem kontrol yang sebelumnya telah dibuat. Misalnya if (suhu is dingin) and (cahaya is gelap) then (kec_mesin is lambat), dan seterusnya sampai dengan 15 rules.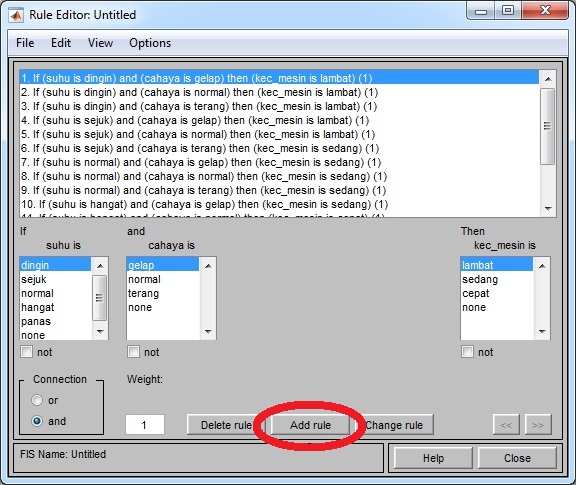
9. Pilih view >> rules, untuk melihat hasil rules yang telah kita buat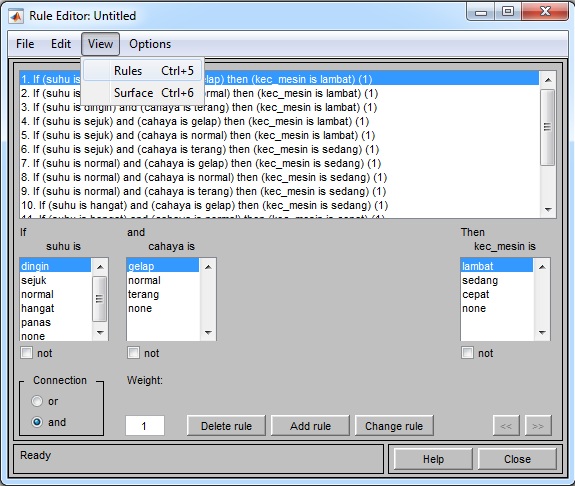
kita dapat menggeser-geser nilai suhu (input1) dan cahaya (input2) sehingga menghasilkan nilai keluaran pada kec. mesin (output) 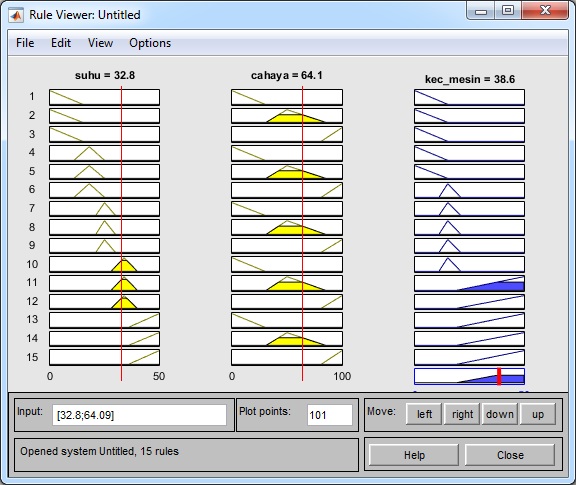
10. Pilih view >> surface, untuk melihat grafik 3D antara suhu, cahaya, dan kec. mesin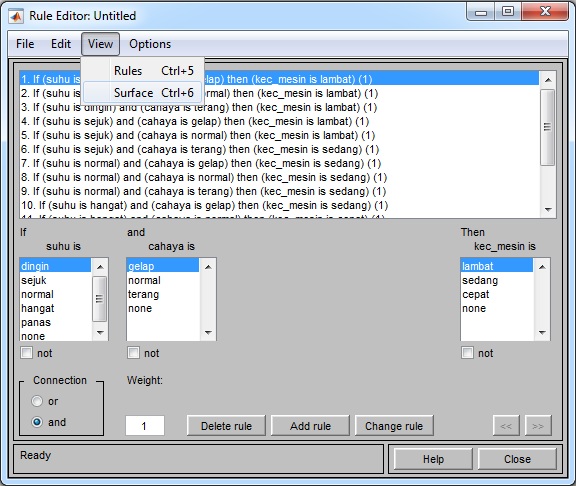
sehingga akan muncul tampilan seperti pada gambar di bawah ini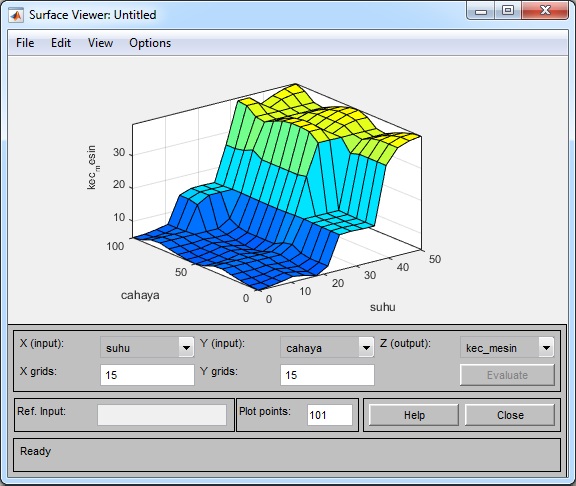
11. Simpanlah FIS yang telah dibuat dengan cara mengklik file >> export >> to file
misalnya simpan dengan nama “mesin.fis”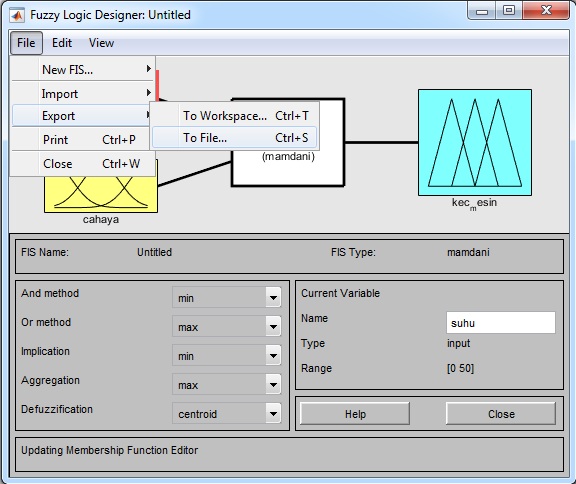
12. Untuk mengecek hasil keluaran dari FIS yang telah dibuat, dapat kita lakukan dengan mengetik kode berikut pada command window:
fis = readfis('mesin');
output = evalfis([10 20],fis)
Hasilnya adalah:
output = 6.2059
Nilai ini artinya: Jika suhu = 10 0C (dingin) dan cahaya = 20 Cd (gelap), maka kec. mesin = 6.2059 m/s (lambat)
Dapat disimpulkan bahwa hasil keluaran FIS sesuai dengan konsep sistem kontrol yang sebelumnya telah dibuat.
Kita dapat membuat tampilan program yang telah kita buat menjadi lebih interaktif menggunakan Graphical User Interface (GUI), seperti contoh GUI di bawah ini :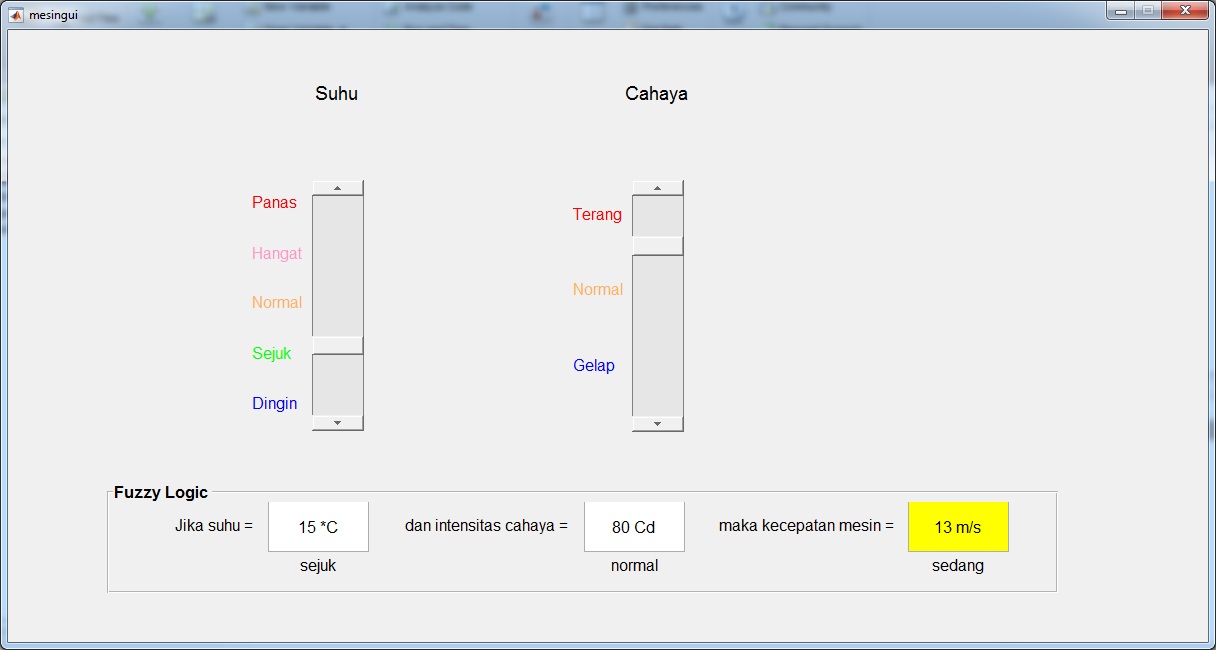
Listing program nya adalah sebagai berikut:
% Adi Pamungkas, S.Si, M.Si
% Website: https://pemrogramanmatlab.com/
% Email : adipamungkas@st.fisika.undip.ac.id
function varargout = mesingui(varargin)
% MESINGUI MATLAB code for mesingui.fig
% MESINGUI, by itself, creates a new MESINGUI or raises the existing
% singleton*.
%
% H = MESINGUI returns the handle to a new MESINGUI or the handle to
% the existing singleton*.
%
% MESINGUI('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in MESINGUI.M with the given input arguments.
%
% MESINGUI('Property','Value',...) creates a new MESINGUI or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before mesingui_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to mesingui_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help mesingui
% Last Modified by GUIDE v2.5 04-Oct-2013 22:13:32
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @mesingui_OpeningFcn, ...
'gui_OutputFcn', @mesingui_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before mesingui is made visible.
function mesingui_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to mesingui (see VARARGIN)
% Choose default command line output for mesingui
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
movegui(hObject, 'center');
% UIWAIT makes mesingui wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = mesingui_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on slider movement.
function slider2_Callback(hObject, eventdata, handles)
% hObject handle to slider2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'Value') returns position of slider
% get(hObject,'Min') and get(hObject,'Max') to determine range of slider
slider_suhu = get(hObject,'Value');
set(handles.edit2, 'string', strcat(num2str(slider_suhu),' *C'));
if slider_suhu <= 10
suhu = 'dingin';
elseif slider_suhu > 10 && slider_suhu <= 20
suhu = 'sejuk';
elseif slider_suhu > 20 && slider_suhu <= 27
suhu = 'normal';
elseif slider_suhu > 27 && slider_suhu <= 35
suhu = 'hangat';
else
suhu = 'panas';
end
set(handles.text14, 'string', suhu);
slider_cahaya = get(handles.slider3,'Value');
input = [slider_suhu slider_cahaya];
fis = readfis('mesin');
out = evalfis(input,fis);
if out <= 10
kec_mesin = 'lambat';
elseif out > 10 && out <= 18
kec_mesin = 'sedang';
else
kec_mesin = 'cepat';
end
set(handles.edit4,'string',strcat(num2str(out),' m/s'));
set(handles.text16, 'string', kec_mesin);
% --- Executes during object creation, after setting all properties.
function slider2_CreateFcn(hObject, eventdata, handles)
% hObject handle to slider2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: slider controls usually have a light gray background.
if isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor',[.9 .9 .9]);
end
% --- Executes on slider movement.
function slider3_Callback(hObject, eventdata, handles)
% hObject handle to slider3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'Value') returns position of slider
% get(hObject,'Min') and get(hObject,'Max') to determine range of slider
slider_cahaya = get(hObject,'Value');
set(handles.edit3, 'string', strcat(num2str(slider_cahaya),' Cd'));
if slider_cahaya <= 30
cahaya = 'gelap';
elseif slider_cahaya > 30 && slider_cahaya <= 80
cahaya = 'normal';
else
cahaya = 'terang';
end
set(handles.text15, 'string', cahaya);
slider_suhu = get(handles.slider2,'Value');
input = [slider_suhu slider_cahaya];
fis = readfis('mesin');
out = evalfis(input,fis);
if out <= 10
kec_mesin = 'lambat';
elseif out > 10 && out <= 18
kec_mesin = 'sedang';
else
kec_mesin = 'cepat';
end
set(handles.edit4,'string',strcat(num2str(out),' m/s'));
set(handles.text16, 'string', kec_mesin);
% --- Executes during object creation, after setting all properties.
function slider3_CreateFcn(hObject, eventdata, handles)
% hObject handle to slider3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: slider controls usually have a light gray background.
if isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor',[.9 .9 .9]);
end
function edit2_Callback(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit2 as text
% str2double(get(hObject,'String')) returns contents of edit2 as a double
% --- Executes during object creation, after setting all properties.
function edit2_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit3_Callback(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit3 as text
% str2double(get(hObject,'String')) returns contents of edit3 as a double
% --- Executes during object creation, after setting all properties.
function edit3_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function edit4_Callback(hObject, eventdata, handles)
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit4 as text
% str2double(get(hObject,'String')) returns contents of edit4 as a double
% --- Executes during object creation, after setting all properties.
function edit4_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
File source code lengkap logika fuzzy pada pemrograman di atas dapat diperoleh melalui halaman berikut ini: Source Code
Penerapan logika fuzzy untuk sistem pengatur kecepatan mesin bisa dilihat pada video tutorial berikut ini:

Posted on August 24, 2015, in Data mining, Pengenalan Matlab, Pengenalan Pola and tagged algoritma fuzzy untuk sistem kontrol, aplikasi logika fuzzy menggunakan matlab, cara membuat aplikasi gui matlab sederhana, cara membuat fuzzy pada matlab, cara membuat gui matlab logika fuzzy, cara membuat logika fuzzy menggunakan matlab, contoh fuzzy menggunakan matlab, contoh logika fuzzy matlab, contoh program aplikasi fuzzy matlab, contoh program gui matlab, contoh program gui matlab fuzzy, contoh program logika fuzzy matlab, contoh program matlab sederhana, data mining logika fuzzy menggunakan matlab, fuzzy logic, fuzzy logic in matlab, fuzzy matlab, gui matlab untuk logika fuzzy, logika fuzzy, logika fuzzy menggunakan gui matlab, logika fuzzy sederhana matlab, logika fuzzy sederhana menggunakan gui matlab, logika fuzzy untuk sistem kontrol, tutorial fuzzy matlab, tutorial logika fuzzy matlab. Bookmark the permalink. 19 Comments.




































gan, kenapa gui nya eror ?
Errornya gimana mas?
Karena sdh saya coba di komputer saya tdk error
Pakai matlab versi berapa?
mas jika dipakai untuk sistem kendali suhu dan kelembapan bisa gak, dengan arduino n matlab
matlab merupakan software yang bisa diintegrasikan dengan perangkat keras seperti arduino, raspberry, dll
sangat bermanfaat mas, terma kasih banyak
Alhamdulillah
sama sama kukuh
mas kok GUI nya gk bisa dijalankan
ini Pakai matlab versi berapa?
koding tsb bisa dijalankan menggunakan matlab r2015b
permisi mas mau tanya kalau membuat rule base nya itu aturannya gimana punya saya kok eror
Aturan rule base dapat dipelajari pada materi di atas
Selamat pagi Mas skrg saya sedang mengerjakan tugas akhir untuk deteksi kebocoran pipa, disini saya menggunakan data dari perubahan sensor tekanan, untuk menentukan model svm yang dipakai dan cara membuat data latih dan data uji nya itu bagaimana ya mas, terima kasih mas sebelumnya
selamat pagi nizal
materi mengenai svm bisa dipelajari pada halaman berikut ini
ini variabelnya bisa sampai 20 kah gan ?
Bisa dicoba terlebih dahulu
Mas apakah saya bisa menghubungi mas untuk bisa bertanya2 mengenai tugas akhir saya? Terimakasih dan mohon maaf mengganggu waktunya
Bisa silakan
ijin bertanya kak, ini code nya kalo mau dibuat ke arduino uno gimana ya kak?
good article
Algoritma adalah serangkaian langkah atau aturan terstruktur yang dirancang untuk menyelesaikan suatu masalah atau mencapai suatu tujuan dalam komputasi dan pemrograman. Algoritma menjadi dasar dalam pengembangan perangkat lunak, membantu komputer memproses data dengan efisien dan efektif. Keberhasilan suatu program komputer seringkali tergantung pada desain dan implementasi algoritmanya.