
Background Subtraction Dalam Ruang Warna HSV
Penggunaan teknologi pengolahan citra dalam pemantauan lalu lintas menjadi semakin penting dalam upaya meningkatkan keselamatan jalan raya dan efisiensi transportasi. Salah satu metode yang umum digunakan adalah deteksi objek menggunakan metode background subtraction dalam ruang warna HSV. Artikel ini akan menjelaskan konsep metode ini serta penerapannya untuk deteksi kendaraan di jalan raya.

Deteksi kendaraan di jalan raya adalah salah satu aspek penting dalam sistem pemantauan lalu lintas otomatis. Hal ini dapat digunakan untuk berbagai tujuan, seperti pemantauan lalu lintas real-time, mengidentifikasi pelanggaran lalu lintas, dan mengoptimalkan aliran lalu lintas.
Salah satu teknik yang efektif dalam deteksi objek adalah metode background subtraction. Metode ini membandingkan citra saat ini (current frame) dengan citra latar belakang (background) dan mengidentifikasi perubahan yang terjadi, yang dapat mencakup objek bergerak seperti kendaraan.
Ruang Warna HSV
Ruang warna HSV (Hue, Saturation, Value) adalah ruang warna yang digunakan dalam pengolahan citra yang memungkinkan kita untuk memisahkan informasi warna dari informasi kecerahan dan saturasi. Ruang warna ini terdiri dari tiga komponen utama:
- Hue (H): Nilai ini mengukur jenis warna dalam spektrum warna, seperti merah, hijau, biru, dsb.
- Saturation (S): Nilai ini mengukur intensitas warna atau sejauh mana warna tersebut jenuh.
- Value (V): Nilai ini mengukur tingkat kecerahan dari warna.
Ruang warna HSV memungkinkan kita untuk lebih efektif mengenali objek berdasarkan warna dan memisahkan objek dari latar belakang dengan cara yang lebih baik.
Metode Background Subtraction dalam Ruang Warna HSV
Berikut adalah langkah-langkah umum yang digunakan dalam metode background subtraction dalam ruang warna HSV untuk deteksi kendaraan di jalan raya:
- Pemilihan Citra Latar Belakang (Background): Citra latar belakang adalah gambar latar belakang yang diambil saat tidak ada kendaraan atau objek yang diinginkan di jalan raya.
- Konversi ke Ruang Warna HSV: Citra latar belakang dan citra saat ini dikonversi ke ruang warna HSV. Ini memungkinkan kita untuk lebih fokus pada perbedaan dalam komponen warna (Hue) antara latar belakang dan objek.
- Background Subtraction: Operasi background subtraction dilakukan dengan menghitung perbedaan (dalam komponen Hue) antara citra saat ini dan citra latar belakang. Ini menghasilkan citra yang menunjukkan perubahan warna dari latar belakang.
- Konversi ke Citra Biner: Citra hasil background subtraction dikonversi menjadi citra biner di mana objek yang terdeteksi diwakili sebagai piksel putih dan latar belakang sebagai piksel hitam.
- Post-processing: Citra biner yang dihasilkan dapat mengandung noise atau komponen yang tidak diinginkan. Oleh karena itu, seringkali diterapkan operasi morfologi seperti erosi dan dilasi untuk membersihkan dan menghubungkan objek yang terpisah.
- Deteksi Kendaraan: Kendaraan atau objek lain yang terdeteksi pada citra biner dapat diidentifikasi dan dilacak. Ini dapat melibatkan proses pengelompokan objek berdasarkan atribut seperti lokasi dan ukuran.
- Tindakan Selanjutnya: Hasil deteksi dapat digunakan untuk berbagai tujuan, termasuk pemantauan lalu lintas real-time, penghitungan volume lalu lintas, dan deteksi pelanggaran lalu lintas.
Berikut ini merupakan algoritma pemrograman MATLAB untuk deteksi objek menggunakan metode background subtraction:
- Membaca Citra Latar Belakang dan Frame Saat Ini: Citra latar belakang dan citra saat ini dibaca dari file gambar yang telah disediakan.
- Menampilkan Citra Latar Belakang dan Citra Saat Ini: Citra latar belakang dan citra saat ini ditampilkan dalam subplot untuk tujuan pemantauan visual.
- Konversi ke Mode Warna HSV: Kedua citra dikonversi dari mode warna RGB ke mode warna HSV. Ini dilakukan dengan tujuan memproses tingkat keabuan (value) dari citra, yang akan membantu dalam pengenalan perubahan.
- Operasi Bitwise XOR: Operasi XOR dilakukan antara citra latar belakang dan citra saat ini pada mode warna HSV. Hasil operasi ini akan menghasilkan perbedaan antara dua citra tersebut, dengan fokus pada perbedaan tingkat keabuan (value).
- Konversi ke Citra Grayscale: Hasil dari operasi XOR dikonversi menjadi citra grayscale. Ini menghasilkan citra yang menunjukkan perbedaan antara latar belakang dan objek yang mungkin muncul.
- Konversi ke Citra Biner: Citra grayscale diubah menjadi citra biner, di mana piksel-piksel yang mewakili perbedaan antara latar belakang dan objek akan menjadi piksel putih (1), sementara yang lainnya menjadi piksel hitam (0).
- Penghapusan Noise dengan Median Filter: Citra biner yang dihasilkan kemudian dilakukan pengolahan dengan menggunakan median filter untuk menghilangkan noise dan meningkatkan kualitas citra.
- Labelisasi Obyek: Citra biner yang telah diolah kemudian diberi label pada objek-obyek yang terdeteksi menggunakan fungsi
bwlabel. Ini membantu dalam mengidentifikasi dan memisahkan objek yang berbeda. - Pembersihan Obyek: Noise atau objek yang terlalu kecil dihapus berdasarkan area mereka dalam piksel. Objek-objek yang kecil tersebut dianggap sebagai noise dan dihapus dari citra.
- Pengenalan Obyek: Hasil akhir dari proses ini adalah citra biner yang berisi objek yang terdeteksi pada latar belakang. Citra ini kemudian digunakan untuk membuat masker (mask) yang menunjukkan posisi objek-objek tersebut.
- Pengenalan Warna pada Obyek: Citra asli saat ini diubah dengan mengubah warna piksel yang sesuai dengan objek terdeteksi pada citra biner. Objek diwarnai dalam citra RGB sementara latar belakang tetap tidak berubah.
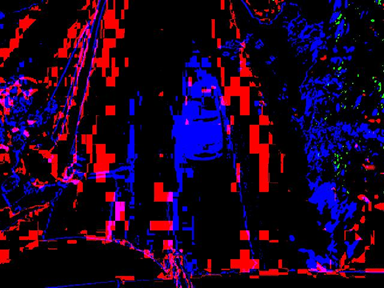
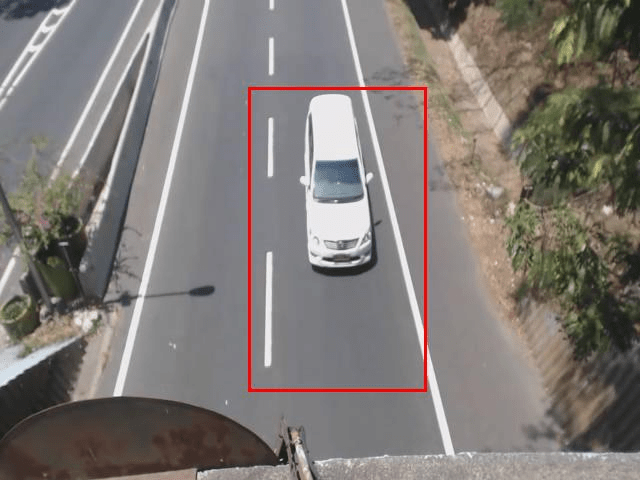
- Menampilkan Hasil: Hasil akhir dari proses ini adalah dua subplot. Yang satu menunjukkan citra biner dari objek yang terdeteksi, dan yang lainnya adalah citra RGB yang menampilkan objek yang terdeteksi diwarnai dalam warna merah (R), sementara latar belakang tetap dalam warna aslinya.










Penerapan dalam Sistem Pemantauan Lalu Lintas
Penerapan metode background subtraction dalam ruang warna HSV untuk deteksi kendaraan di jalan raya dapat dilakukan dengan menggunakan kamera pemantauan. Sistem akan terus memperbarui citra latar belakangnya dan membandingkannya dengan citra saat ini. Setiap perubahan yang terdeteksi akan diidentifikasi sebagai objek bergerak.
Penerapan ini juga dapat ditingkatkan dengan teknologi computer vision dan machine learning untuk meningkatkan akurasi deteksi, membedakan jenis kendaraan, dan mendukung pengambilan keputusan otomatis dalam sistem lalu lintas.
Berikut adalah pseudocode dari algoritma deteksi objek menggunakan metode background subtraction:
1. Membaca Citra Latar Belakang (Background)
2. Membaca Citra Saat Ini (CurrentFrame)
3. Tampilkan Background dan CurrentFrame
4. Konversi Background dan CurrentFrame ke Mode Warna HSV
[Background_hsv] = rgb2hsv(Background)
[CurrentFrame_hsv] = rgb2hsv(CurrentFrame)
5. Hitung Perbedaan (Out) antara Background_hsv dan CurrentFrame_hsv
Out = Background_hsv XOR CurrentFrame_hsv
6. Konversi Out ke Citra Grayscale
Out = rgb2gray(Out)
7. Konversi Out ke Citra Biner
BinaryImage = CitraBiner(Out)
8. Terapkan Median Filter pada BinaryImage untuk Menghilangkan Noise
FilteredImage = MedianFilter(BinaryImage)
9. Labelisasi Obyek pada FilteredImage
[L, num] = bwlabel(FilteredImage)
10. Lakukan Iterasi untuk Setiap Obyek pada Labelisasi:
For i = 1 to num
dd = Area dari Obyek ke-i
If (dd < BatasArea)
Hapus Obyek ke-i dari L
11. Konversi L ke Citra Biner (Logical)
L = CitraBiner(L)
12. Temukan Posisi (row, col) Obyek pada Citra L yang bernilai 1
13. Potong Citra Saat Ini (CurrentFrame) dengan Koordinat Obyek yang Terdeteksi
h_bw = imcrop(CurrentFrame, [min(col), min(row), max(col) - min(col), max(row) - min(row)])
14. Buat Masker (mask) berdasarkan Posisi Obyek yang Terdeteksi
mask = CitraBiner(a, b)
mask[min(row):max(row), min(col):max(col)] = 1
mask = bwperim(mask, 8)
mask = imdilate(mask, strel('square', 5))
15. Warna Obyek yang Terdeteksi pada Citra Saat Ini
R = Komponen Merah dari CurrentFrame
G = Komponen Hijau dari CurrentFrame
B = Komponen Biru dari CurrentFrame
R(mask) = 255
G(mask) = 0
B(mask) = 0
16. Hasil Akhir adalah Citra Terdeteksi (L) dan Citra Saat Ini yang Diwarnai (RGB)
Metode background subtraction dalam ruang warna HSV adalah salah satu pendekatan yang efektif untuk deteksi kendaraan di jalan raya dalam sistem pemantauan lalu lintas. Dengan memanfaatkan perbedaan warna antara objek dan latar belakang, teknik ini memungkinkan pengenalan objek secara akurat dan dapat digunakan untuk berbagai tujuan, termasuk peningkatan keselamatan lalu lintas dan manajemen lalu lintas yang lebih efisien.
Posted on September 7, 2023, in Pengolahan Citra and tagged analisis citra, background subtraction, deteksi kendaraan, Deteksi Objek, Keamanan Lalu Lintas, Manajemen Lalu Lintas, Pemantauan Lalu Lintas, Penerapan Ruang Warna, pengolahan citra, ruang warna hsv, Teknik Deteksi, Teknologi Transportasi, visi komputer. Bookmark the permalink. Leave a comment.



































Leave a comment
Comments 0